I'm delighted to announce that after many months of work, the ZMK Studio Minimum Viable Product (MVP) has reached General Availability (GA) status. I'm very excited with the feature set and foundation we've gotten into this first release, and equally excited for the upcoming work to add even more features.
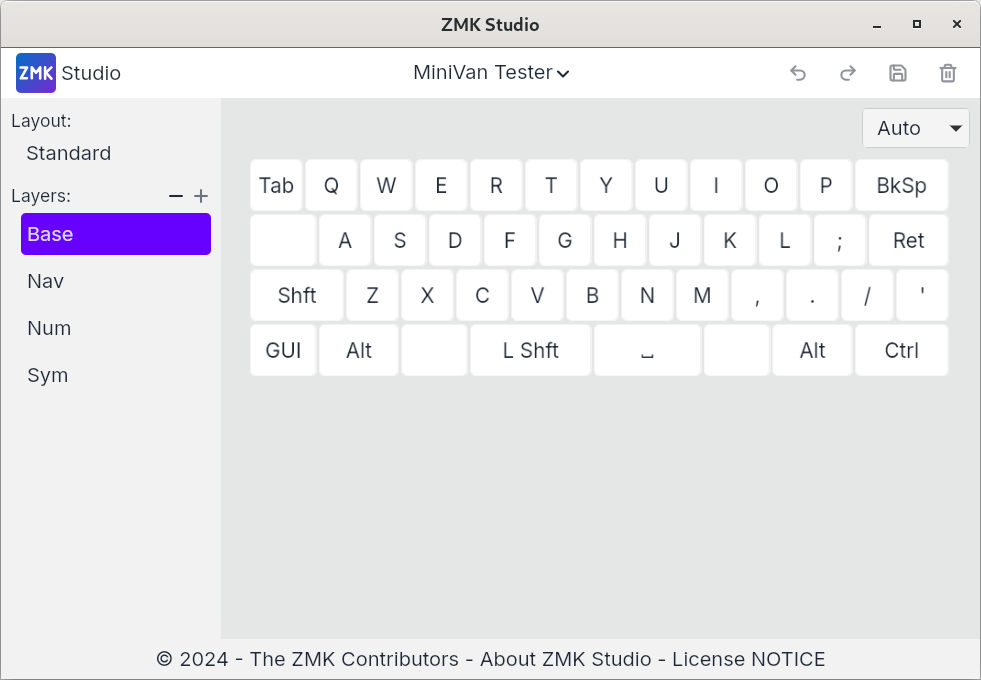
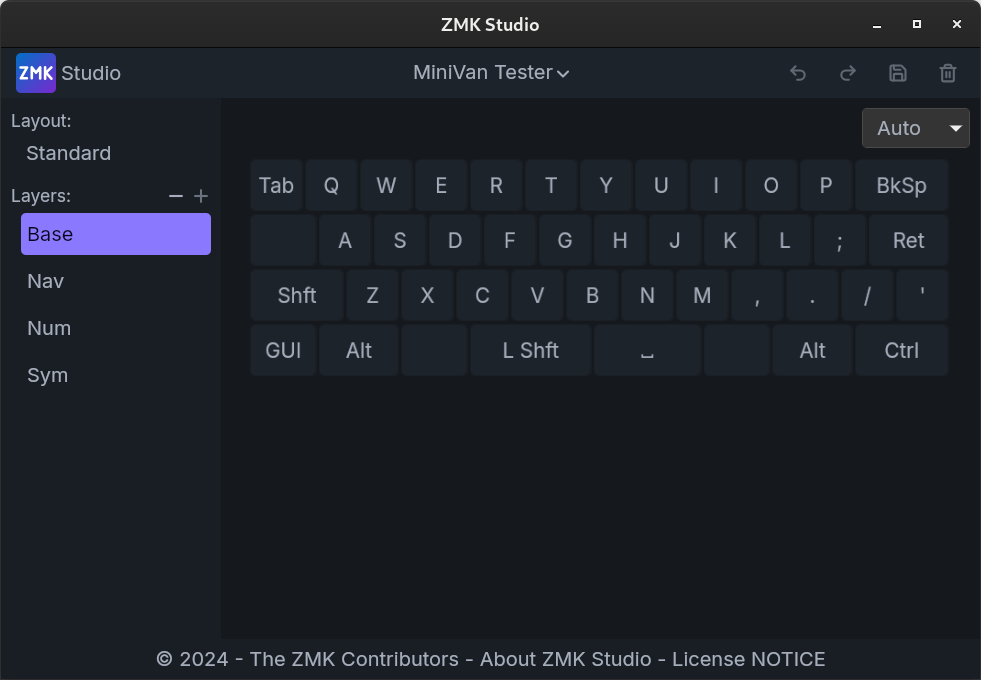
ZMK Studio provides runtime keymap functionality for ZMK powered devices, allowing you to make changes without the need to flash new firmware. It is a combination of major firmware enhancements paired with a new frontend application for interacting with your keyboard.
The app is available for compatible browsers, and as an installable desktop application for Linux, macOS, and Windows.